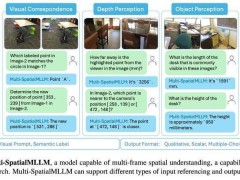
近日,科技界傳來一項重要進展,meta公司與香港中文大學攜手,在人工智能領域邁出了關鍵一步。他們共同推出的Multi-SpatialMLLM模型,實現了對深度感知、視覺對應和動態感知三大功能的整合,打破了單幀圖像分析的局限性。
近年來,多模態大語言模型(MLLMs)在視覺任務處理方面取得了顯著成果。然而,作為獨立的數字實體,MLLMs的實際應用卻受到了一定限制。隨著機器人、自動駕駛等領域的快速發展,對MLLMs的空間理解能力提出了更高要求。但遺憾的是,現有的模型在基礎空間推理任務中表現并不理想,例如,它們常常無法準確區分左右。
針對這一難題,meta旗下的FAIR團隊與香港中文大學展開了深入研究。他們發現,過去的研究往往將問題歸咎于缺乏專門的訓練數據,并試圖通過單張圖像的空間數據進行改進。然而,這種方法只能局限于靜態視角的分析,缺乏動態信息處理的能力。
為了解決這個問題,FAIR團隊與香港中文大學聯合推出了MultiSPA數據集。這個數據集包含了超過2700萬個樣本,涉及多樣化的3D和4D場景,為MLLMs的訓練提供了豐富的資源。MultiSPA數據集結合了Aria Digital Twin、Panoptic Studio等高質量標注場景數據,并通過GPT-4o生成了多樣化的任務模板,從而確保了數據的全面性和多樣性。
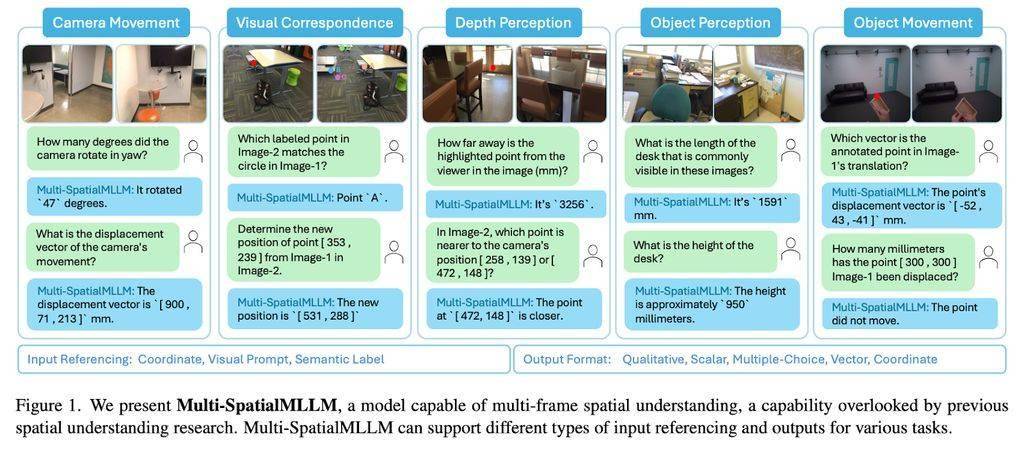
在MultiSPA數據集的基礎上,研究團隊設計了五個訓練任務,包括深度感知、相機移動感知、物體大小感知等。這些任務旨在提升Multi-SpatialMLLM模型在多幀空間推理上的能力,使其能夠更好地理解和處理復雜的空間信息。
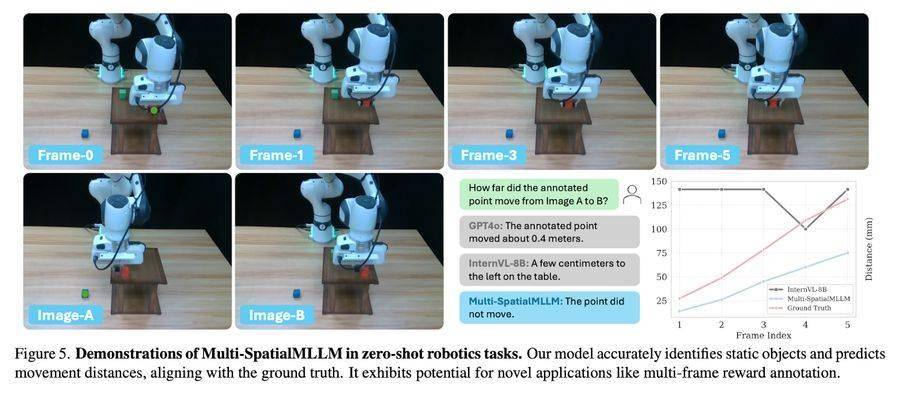
經過嚴格的測試和評估,Multi-SpatialMLLM模型展現出了卓越的性能。在MultiSPA基準測試中,該模型相比基礎模型平均提升了36%,在定性任務上的準確率達到80%-90%,遠超基礎模型的50%。甚至在預測相機移動向量等高難度任務上,該模型也取得了18%的準確率。在BLINK基準測試中,Multi-SpatialMLLM模型的準確率接近90%,平均提升26.4%,超越了多個專有系統。
Multi-SpatialMLLM模型在保持原有性能的同時,還展現出了不依賴過度擬合空間推理任務的通用能力。在標準視覺問答(VQA)測試中,該模型依然保持了出色的表現。這一成果不僅為MLLMs在空間理解方面的發展提供了新的思路和方法,也為機器人、自動駕駛等領域的未來發展奠定了堅實的基礎。